Robotic Pipette End Effector
In ServiceHigh-precision robotic liquid handling system achieving 5μL accuracy for scientific research applications - Developed Summer 2025 at Brookhaven National Laboratory
Project Overview
Industrial robots excel at precise movement but lack the fine liquid handling capabilities needed for scientific research protocols. This project developed a custom end effector enabling microliter-precision liquid handling through integration of 3D printed mechanical actuators, embedded RS485 communication, and ROS2 software stack. The system achieves 5μL ±0.5μL accuracy while maintaining compatibility with standard laboratory pipettes and the UR5e tool exchanger system.
Mechanical Engineering Solution
Quick Swap Mechanism
Enables rapid pipette changes between different volumes without interrupting automated workflows.
- Locking mechanism - Engagement during operation
- Pipette compatibility - Works with standard laboratory pipettes
- Positioning - Alignment for accuracy
Dual Actuator System
Two independent 3D printed actuators replicate human pipetting actions with microliter precision and dual control modes.
- Primary actuator - Plunger control with position feedback
- Secondary actuator - Tip ejection with force limiting
- Stepper motors - Control for repeatable actuation
- Mounting - Combined with quick swap holder
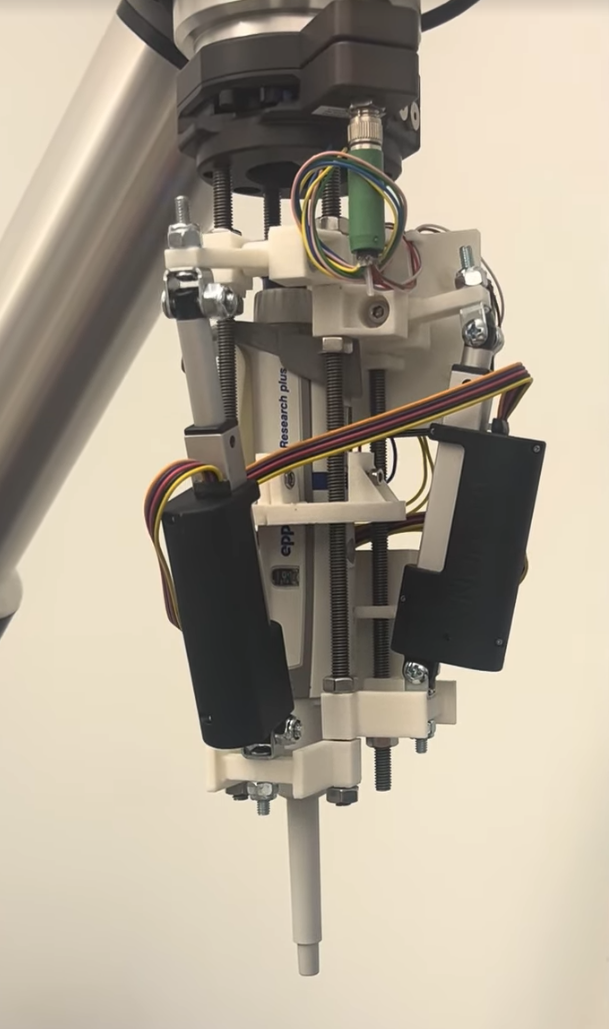
Close-up
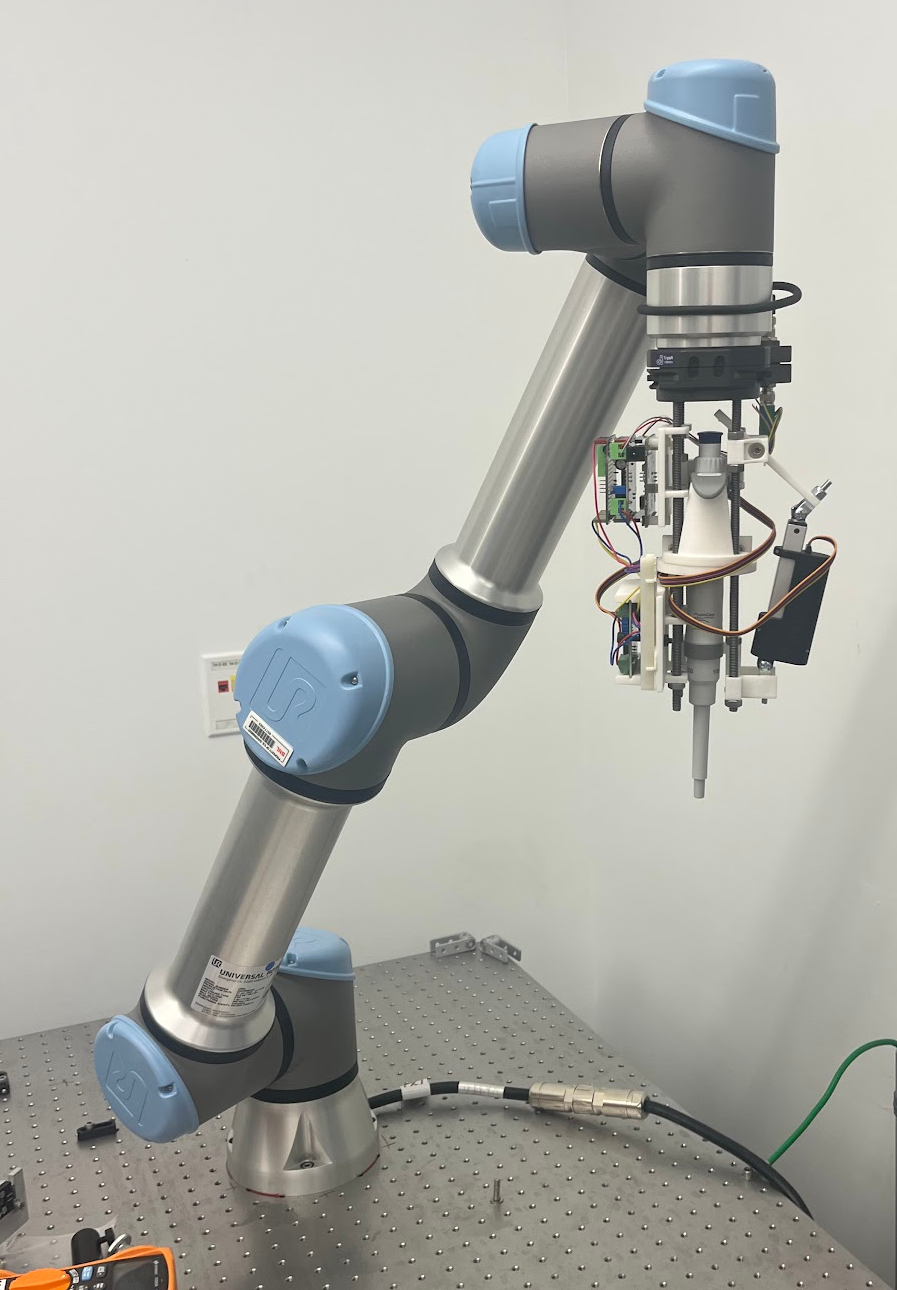
Full System
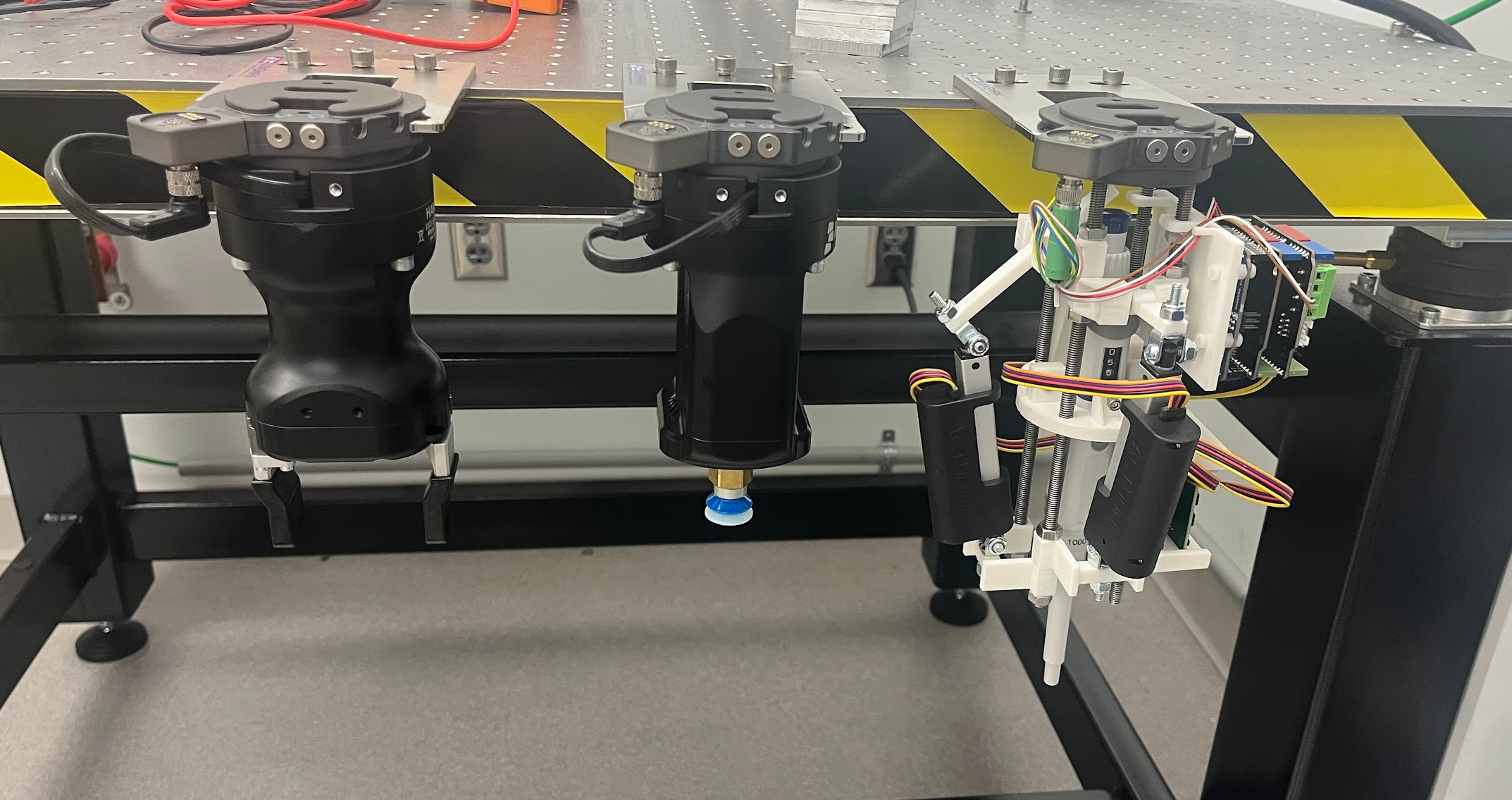
Quick Swap
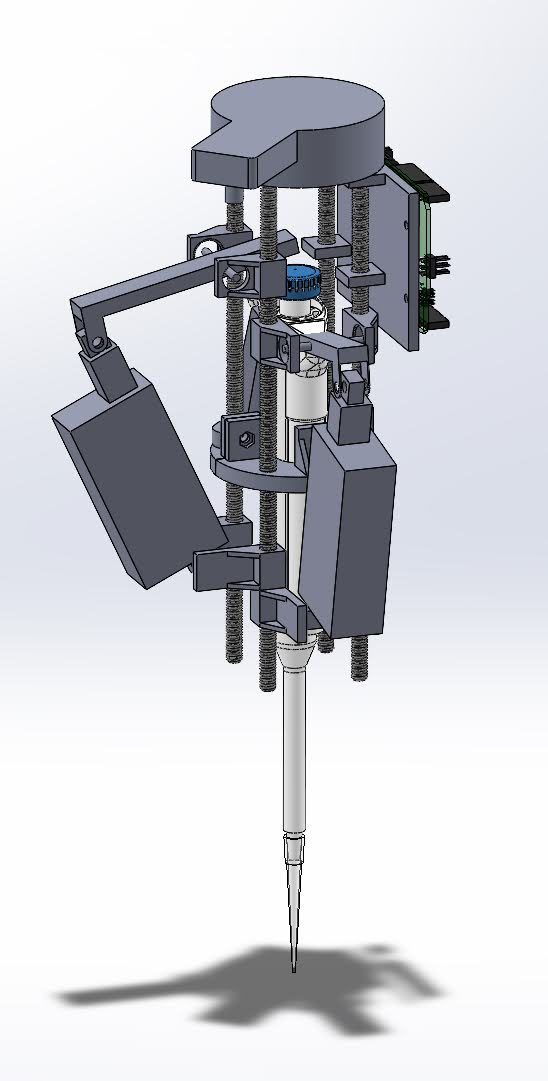
CAD Model

Tool Change
Animation
Technical Challenges & Solutions
Quick Swap System Requirements
Quick swap capability drove the entire system architecture. Laboratory workflows require rapid switching between pipette volumes, but the UR5e tool exchanger prohibited external wires, forcing integration through the robot's internal 8-pin RS485 interface.
- Researched internal wiring requirements and RS485 protocol
- Implemented Arduino-based communication
- Validated compatibility with existing laboratory grippers
Precision & Integration
Achieved 5µL accuracy through position-controlled linear actuators with force feedback, while integrating multiple software layers from low-level Arduino control to high-level ROS2 research scheduling systems.
Technology Stack
Embedded Firmware
- Arduino-based microcontroller
- RS485 protocol implementation
- Dual stepper motor control
- Position feedback and limits
- Command parsing and execution
Driver Layer
- Python ROS2 service bridge
- Serial communication protocol
- MoveIt motion planning interface
- High-level pipetting commands
- Status feedback to ROS2
System Integration
- EROBS scheduling integration
- Bluesky protocol support
- Automated workflow execution
- UR5e tool exchanger compatible
- Laboratory protocol automation
Results
Achieved Performance
Target accuracy of 50μL exceeded with achieved precision of 5μL ±0.5μL. System validated at Brookhaven National Laboratory with full ROS2 compatibility and standard laboratory pipette integration.
Communication Architecture
The tool exchanger quick-swap requirement drove development of a custom RS485-based communication system, enabling internal wiring through the UR5e robot's 8-pin interface while maintaining compatibility with existing laboratory grippers.
Embedded Firmware
Arduino-based microcontroller firmware implements RS485 protocol handling, parsing commands from the robot controller and translating them to stepper motor control signals. The firmware manages dual actuator coordination for plunger depression and tip ejection with position feedback and safety limits.
Python Driver Layer
Python service bridges ROS2 MoveIt motion planning with low-level hardware control. The driver translates high-level pipetting commands (aspirate, dispense, eject) into precise RS485 messages, handles serial communication protocol, and provides status feedback to the ROS2 ecosystem.
System Integration
Full integration with EROBS scheduling system and Bluesky experimental protocols enables automated liquid handling workflows. The communication stack supports real-time operation with sub-second response times for scientific protocols.
Research Poster
Research poster presented at Brookhaven National Laboratory showcasing the robotic pipette end effector project.
Project Impact
Bridged industrial robotics and laboratory precision, enabling automated scientific protocols through interdisciplinary engineering combining mechanical design, embedded programming, and modern robotics frameworks.