Software Engineering Portfolio
Here are some of my software engineering related projects, showcasing my expertise in AI/ML, web development, blockchain, and data analytics.
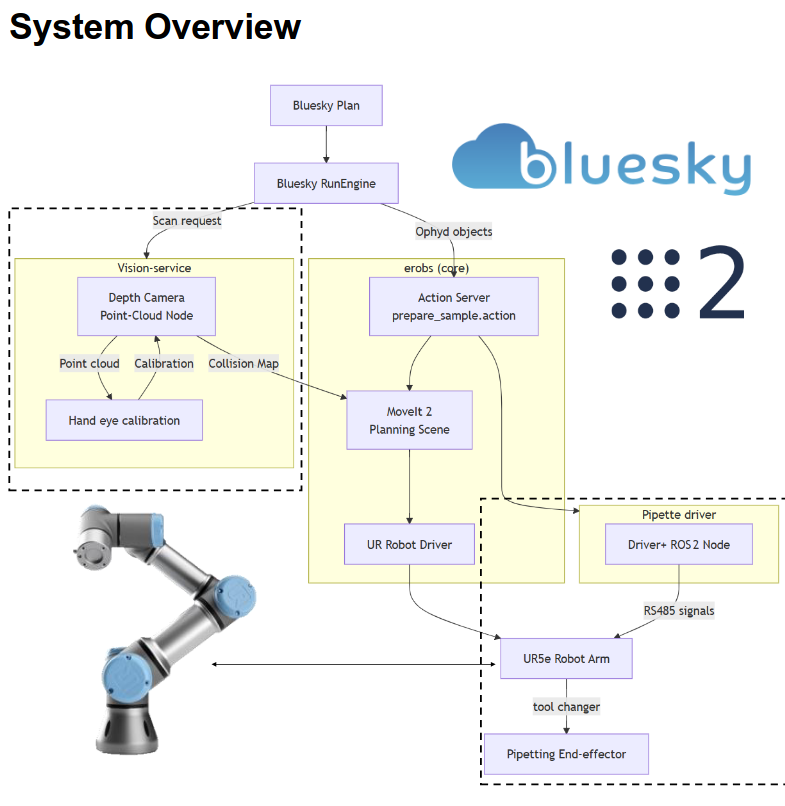
Extensible Robotic Beamline Scientist
Adaptive motion planning stack for novel scientific experiments at National Synchrotron Light Source II. Integrates Bluesky control software with ROS 2 and MoveIt to enable hardware-agnostic Universal Robot control at beamlines. Features dynamic end-effector management, collision-aware motion planning, and automated experimental workflows deployed in production at CMS beamline.
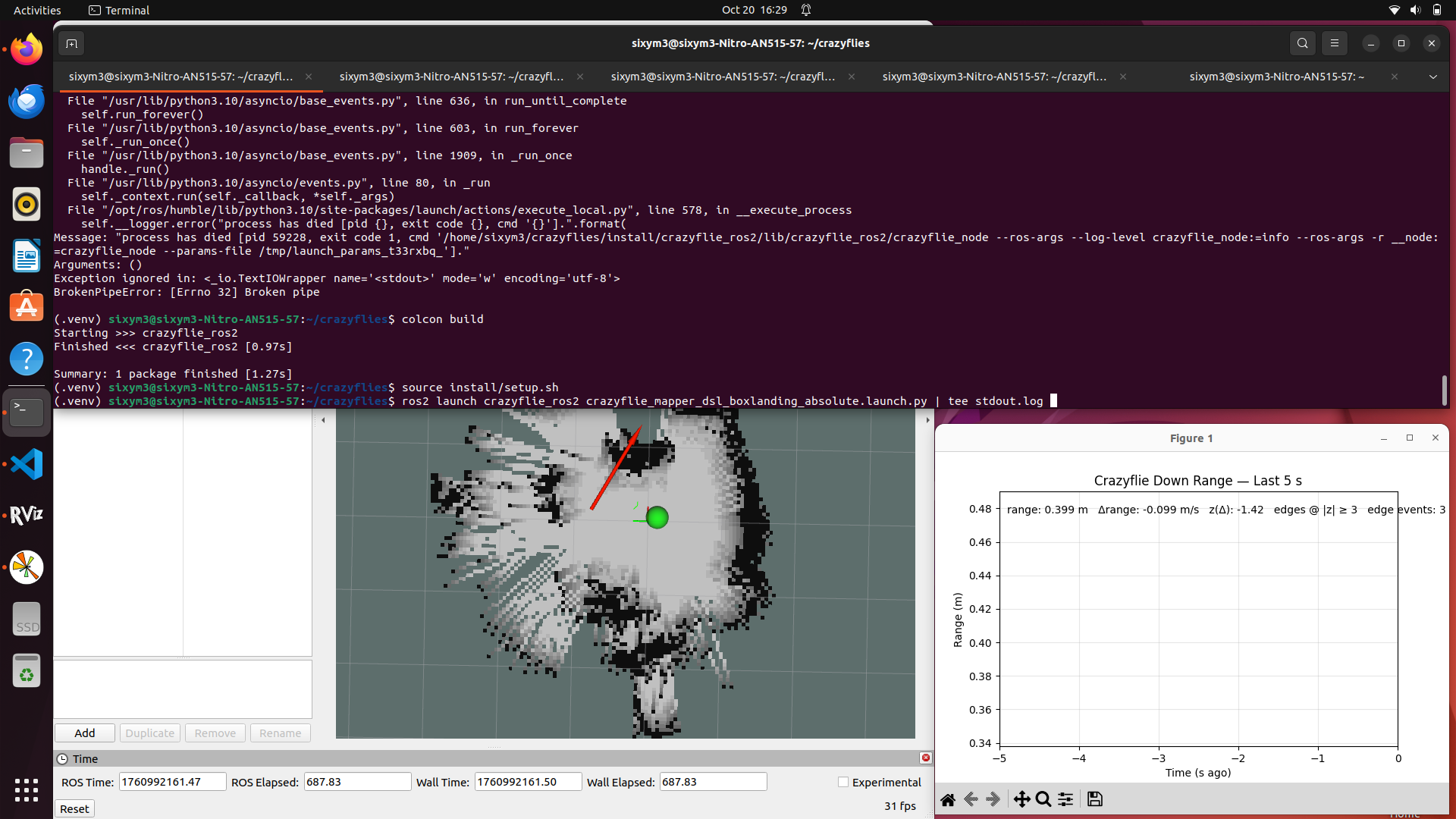
Autonomous UAV Navigation & SLAM
Lightweight SLAM pipeline for resource-constrained Crazyflie 2.1 UAV, fusing IMU and 4-point LiDAR for real-time obstacle mapping. Implemented D* Lite path planner achieving 20% faster replanning than A*, with Minimum Snap trajectory generation for smooth cascaded control. Developed ROS2 bag-based offline validation pipeline enabling deterministic algorithm refinement through flight data replay.
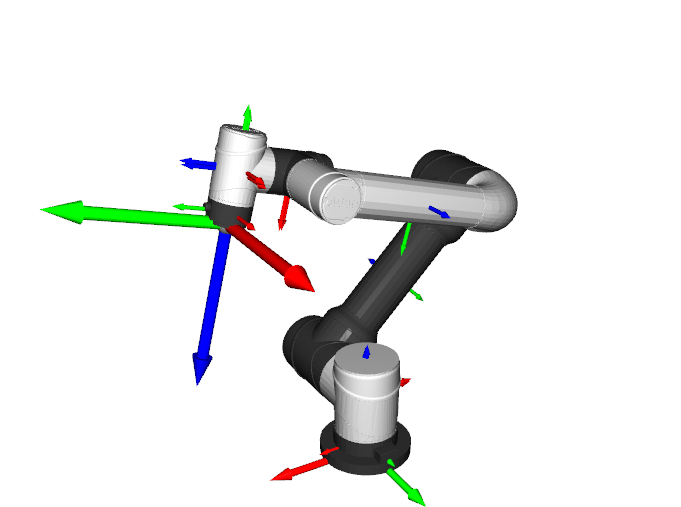
Cobot Trajectory Planning
Advanced kinematics and motion planning for AUBO i5 collaborative robot. Implemented forward and inverse kinematics from URDF model, developed Jacobian-based velocity control for smooth end-effector trajectories, and performed Monte Carlo workspace analysis identifying kinematic singularities. Designed time-parameterized trajectories with polynomial interpolation ensuring C2 continuity for stable, dynamically feasible motion.
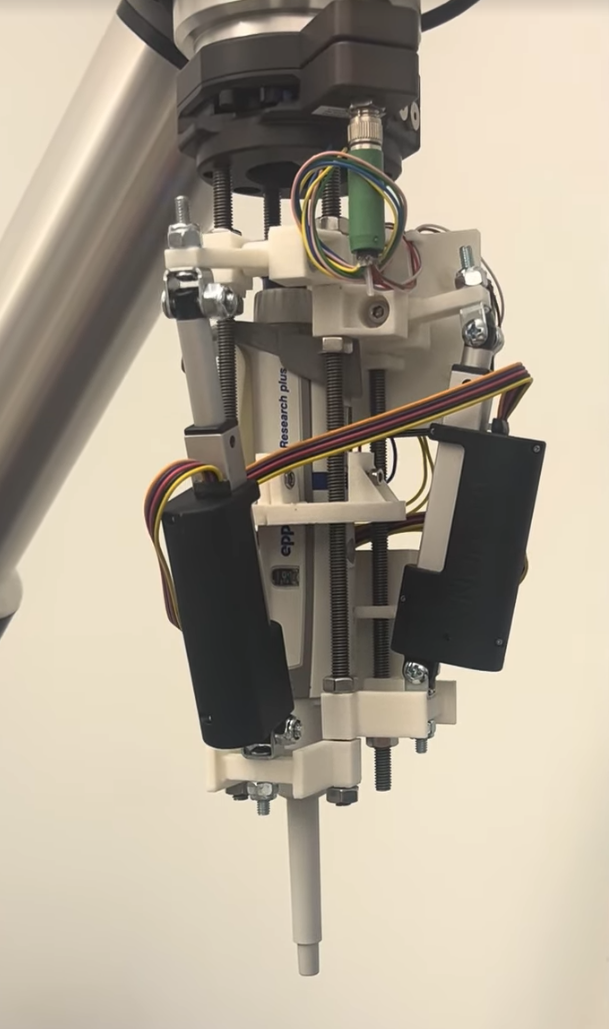
Robotic Pipette Software Stack
Comprehensive software integration for precision robotic liquid handling system with 50µL target achieving 5µL ±0.5µL accuracy. Developed microcontroller firmware with RS485 communication, Python service bridging MoveIt motion planning with hardware control, and ROS2 wrapper for seamless integration with erobs scheduling and Bluesky protocols.
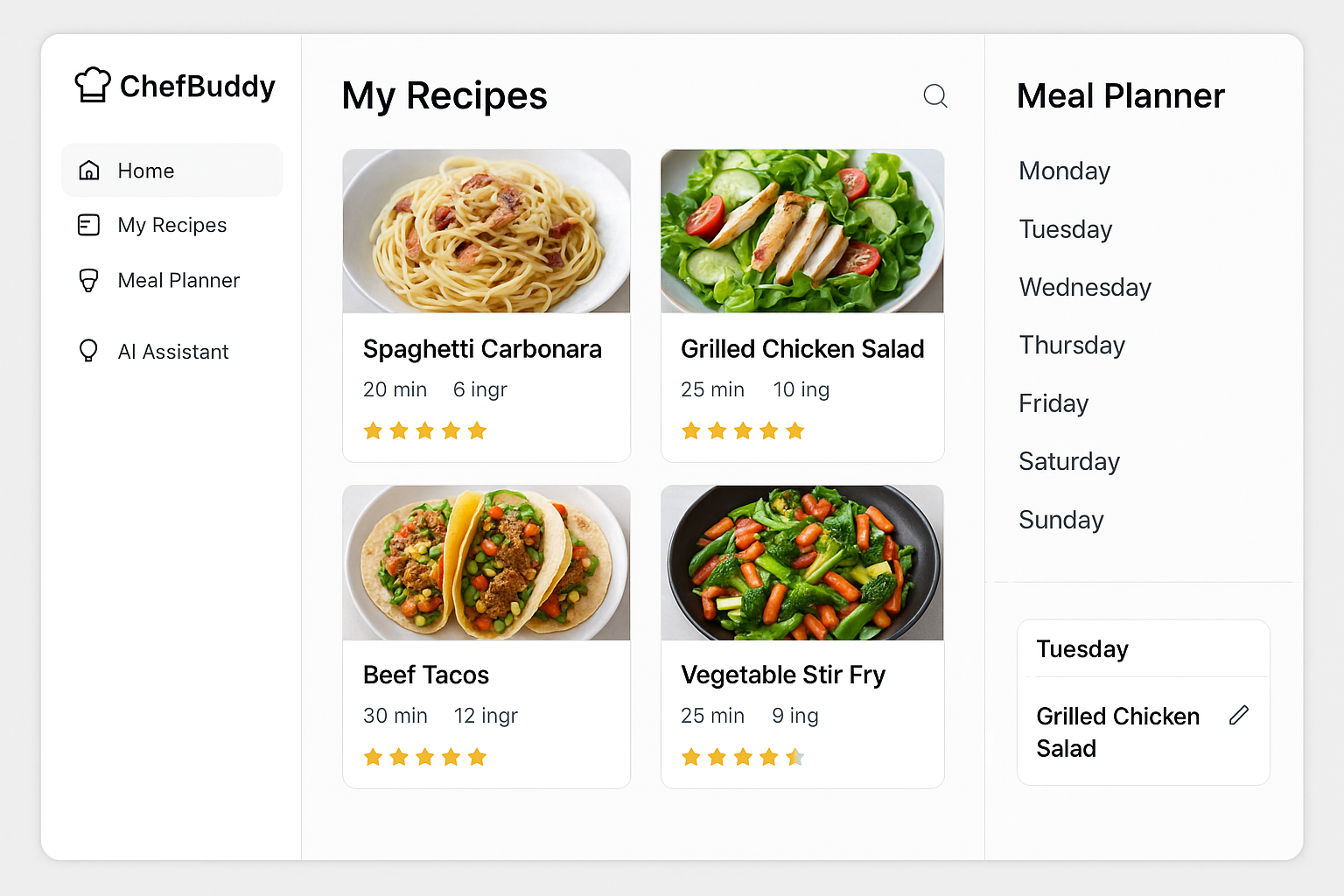
ChefBuddy - AI Recipe Manager
An AI-powered recipe manager inspired by Paprika v3 but enhanced with automated meal planning, smart recipe management, and receipt-based inventory tracking. Built with Express.js, Vue.js, OpenAI, Cheerio, and Axios, it scrapes and summarizes recipes, suggests meals, and manages pantry stock by scanning receipts.

Biomedical ML Bootcamp
Intensive bootcamp hosted by Stony Brook Medicine and CEAS Department focusing on machine learning techniques for biomedical data analytics. Explored Random Forest, SelectKBest, K-Means clustering, and neural networks using PyTorch. Applied edge detection with OpenCV and optimized models using Optuna for hyperparameter tuning, improving accuracy and efficiency.
CarbonShare - Blockchain Carbon Tracking
A decentralized carbon tracking solution powered by blockchain technology. The idea came from Yun Zhang, CEO of Mobileware, who envisioned rewarding onTime Carpool users for reducing their carbon footprint. Built with Solidity, Angular, Python, and deployed on Ethereum testnet with CarbonShare Tokens (CST) as ERC-20 rewards.