Cobot Trajectory Planning
Completed Fall 2025Advanced kinematics, motion planning, and trajectory optimization for AUBO i5 collaborative robot
Project Overview
Kinematics and motion planning study for the AUBO i5 collaborative robot. Implemented forward and inverse kinematics to calculate robot positions, mapped the reachable workspace using Monte Carlo simulation, identified singularities where control becomes challenging, and generated smooth trajectories for robot motion. All implementations done in Python using the robot's URDF model.
Technical Challenges
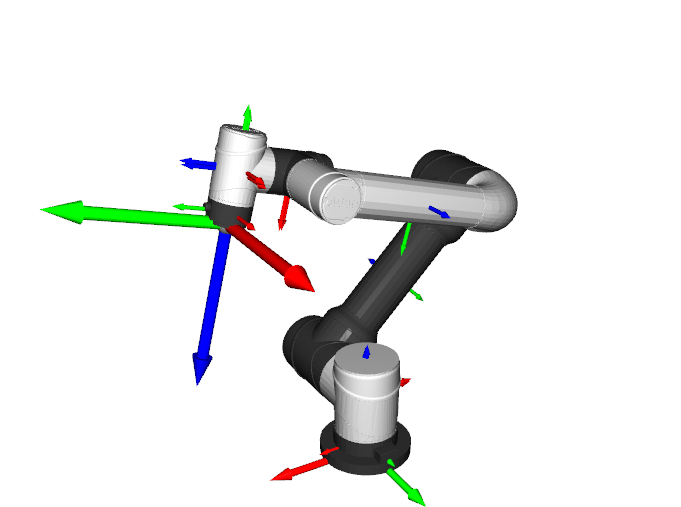
Forward and Inverse Kinematics
Computing the relationship between joint angles and end-effector position for a 6-joint robot. Forward kinematics calculates where the robot's hand ends up given specific joint angles. Inverse kinematics solves the opposite problem: finding joint angles needed to reach a desired position. Multiple solutions often exist for the same target position, requiring careful selection based on joint limits and desired configuration.
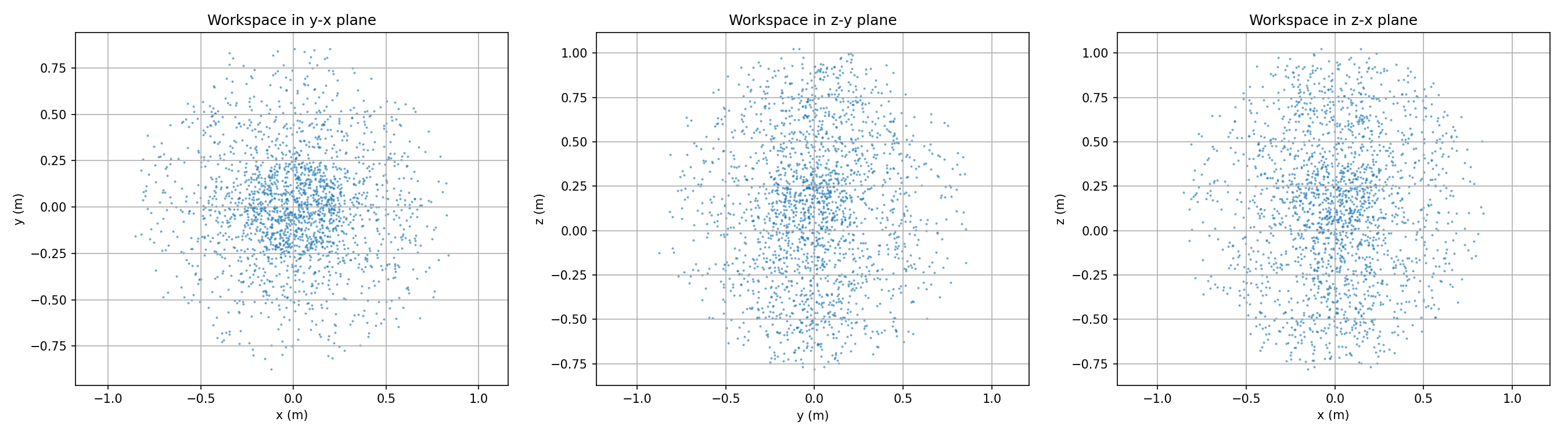
Workspace Mapping
Determining all positions the robot can physically reach. Used Monte Carlo simulation to sample thousands of random joint configurations and map out the reachable workspace. Identified singular configurations where the robot loses mobility in certain directions, which must be avoided during motion planning.
Velocity Control
Converting desired end-effector velocities into appropriate joint velocities. Near singular configurations, this becomes numerically challenging and requires specialized techniques to maintain smooth control without commanding excessive joint speeds.
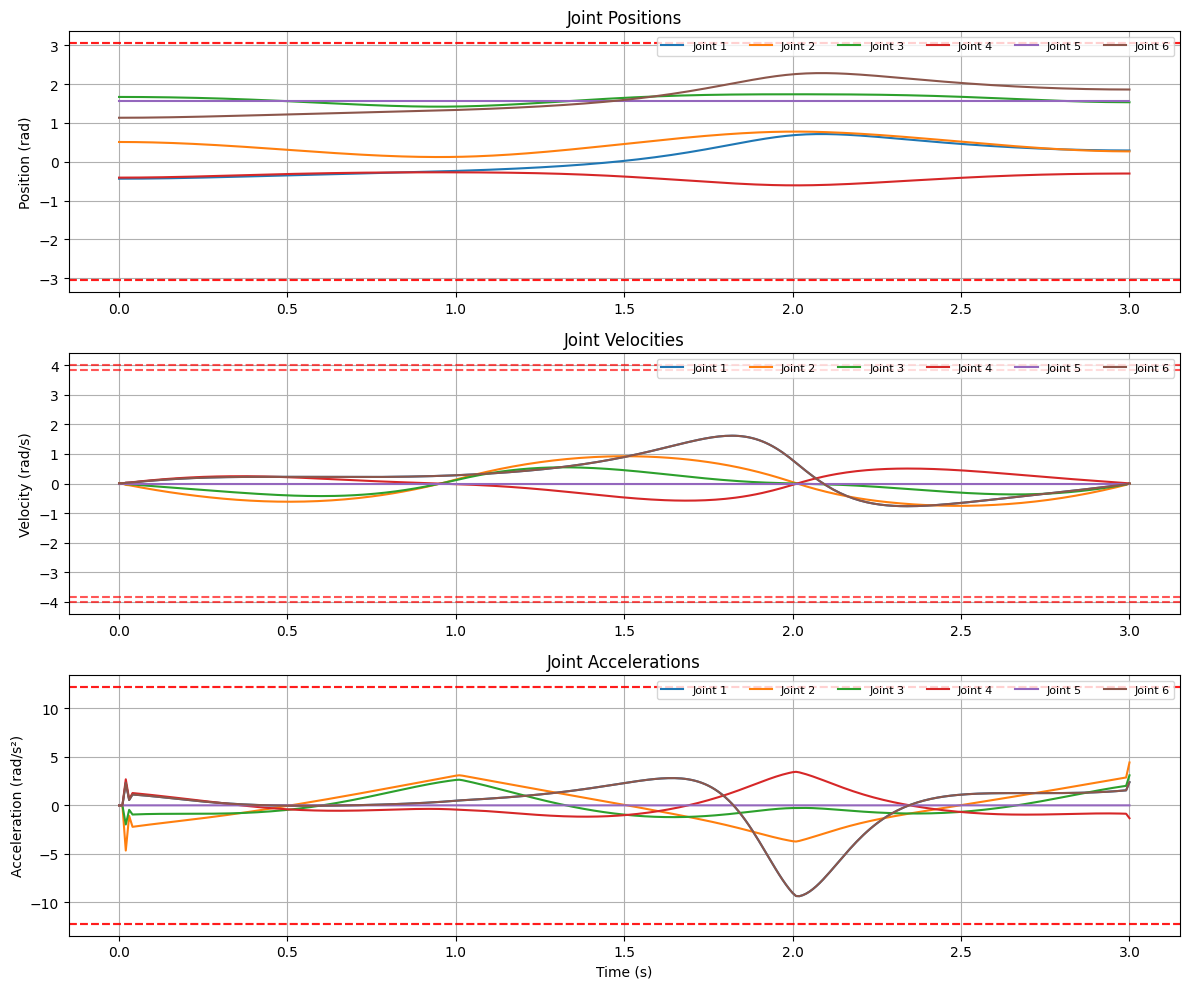
Smooth Trajectory Generation
Creating robot motion that is smooth and respects physical limits. Trajectories must have continuous position, velocity, and acceleration to avoid jerky motion or exceeding motor capabilities. Implemented polynomial interpolation methods to generate feasible paths between waypoints while staying within joint limits and velocity constraints.
Demonstration
Technology Stack
Core Framework
- Python for all algorithm implementations
- NumPy for efficient matrix operations
- SciPy for optimization and numerical methods
- Matplotlib for workspace and trajectory visualization
- URDF parsing for robot model extraction
Kinematics & Analysis
- Forward kinematics with DH parameters
- Analytical and numerical inverse kinematics
- Manipulator Jacobian computation
- Monte Carlo workspace simulation
- Singularity analysis and condition number
Motion Planning
- Resolved-rate velocity control
- Polynomial trajectory generation
- Minimum jerk/snap optimization
- Joint and Cartesian space planning
- Velocity and acceleration constraints
Results & Demonstration
Key Achievements
- Implemented forward and inverse kinematics for 6-joint AUBO i5 robot
- Mapped reachable workspace using 100,000 random configuration samples
- Identified and visualized singular configurations throughout workspace
- Generated smooth trajectories respecting robot physical limits
- Validated kinematics accuracy through round-trip testing
- Implemented velocity-level control for smooth end-effector paths
Workspace visualization, singularity analysis, and trajectory planning demonstrate practical robot kinematics implementation.
Future Enhancements
- Add collision avoidance with obstacles for safer motion planning
- Optimize trajectories to minimize execution time or energy use
- Implement real-time control on physical AUBO i5 hardware
- Develop task planning for complex pick-and-place operations
- Integrate force sensing for contact-based tasks
Project Impact
Demonstrated practical understanding of robot kinematics and motion planning fundamentals. Implemented key algorithms for position calculation, workspace mapping, and trajectory generation. This foundation provides the necessary skills for developing robot control systems in industrial automation and collaborative robotics applications.