Extensible Robotic Beamline Scientist
In serviceAdaptive motion planning stack for novel scientific experiments at National Synchrotron Light Source II
Project Overview
EROBS integrates Bluesky, the control software at many national laboratories, to enable control of Universal Robots at NSLS-II. Many research groups and scientists are acquiring robots but lack the expertise to control them with existing staff. EROBS provides a hardware-agnostic solution that saves time and resources for the facility while enabling advanced experimental automation.
Technical Challenges
Safety and Modularity
Ensuring compliance with beamline safety protocols while maintaining system security. Beamlines operate on isolated networks without unpatched systems, requiring Docker containerization for the EROBS stack and carefully managed cross-VM communication.
Dynamic Tool Changing
Enabling versatile end-effector capabilities for diverse experimental needs. Since beamline scans can take up to 40 minutes, EROBS supports one multipurpose robot with user-defined end effectors that can be automatically selected and loaded for specific tasks.
Results
Successfully deployed at CMS beamline with pilot program underway at FMX beamline. Proof-of-concept demonstrated automated hot plate X-ray scattering experiments, where the robot drops material samples onto pre-heated hot plates and immediately initiates data collection—capturing critical initial reaction phases impossible with manual handling while eliminating human exposure to active X-ray environments.
Demonstration
Technology Stack
ROS 2 Control Layer
- ROS 2 Humble containerized in Docker
- MoveIt motion planning pipeline
- OMPL path planning algorithms
- Dynamic URDF configuration loading
- Collision detection with environment obstacles
Integration Layer
- Custom master node orchestration
- Bluesky RunEngine integration
- Python service bridging
- RESTful API for plan execution
- Dynamic end-effector management
Infrastructure
- Docker containerization for isolation
- VM-based deployment architecture
- Cross-VM communication protocols
- Beamline safety compliance
- Secure network configuration
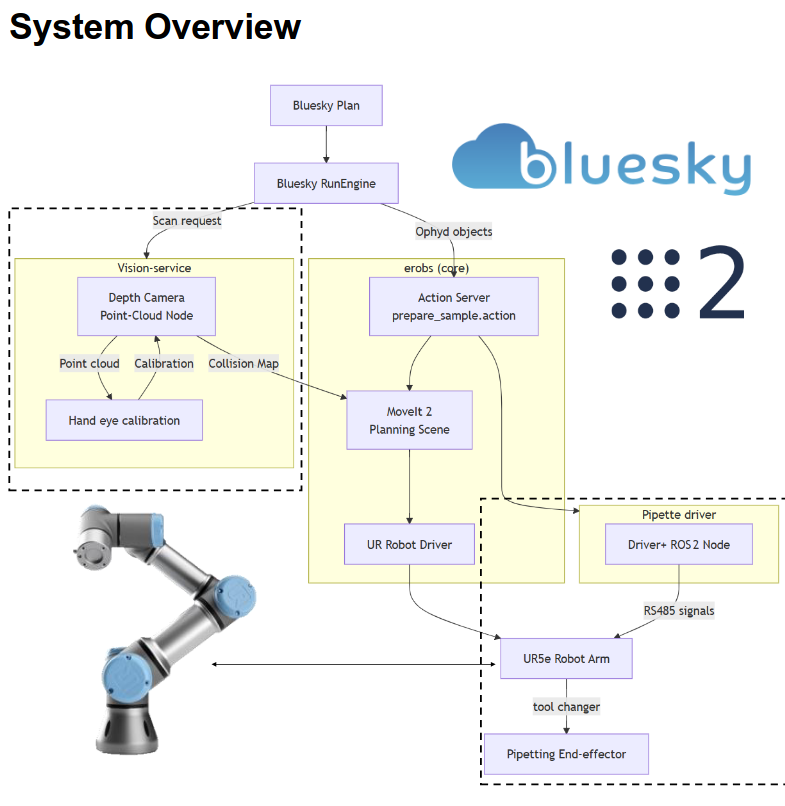
System Architecture
EROBS operates through a layered architecture that bridges Bluesky experimental control with ROS 2 robotic motion planning:
Master Node Orchestration
The custom master node dynamically instantiates different MoveIt configurations based on the selected end-effector. Pre-defined beamline environments are loaded as collision obstacles, ensuring safe motion planning around sensitive equipment.
Bluesky Integration
Bluesky RunEngine sends execution requests to the master server, which translates experimental plans into robot movements. Supported operations include Cartesian positioning, predefined waypoints, and automated gripper swaps with stack reconfiguration.
Dynamic Tool Management
When Bluesky requests a gripper change, the system automatically swaps the end-effector and restarts the MoveIt stack with the correct URDF configuration, maintaining accurate kinematic models throughout experiments.
Limitations
URDF Reconfiguration Overhead
The MoveIt stack loads the URDF (Unified Robot Description Format) as an immutable object at initialization. When changing end effectors, the robot description becomes inaccurate unless the URDF is updated. This requires restarting the entire MoveIt stack, which takes approximately 20 seconds and introduces significant delays in experimental workflows. This architectural constraint limits the practical frequency of tool changes during active experiments.
Project Impact
Successfully engineered an automated experimental workflow pipeline for hardware-agnostic Universal Robot control through Bluesky and ROS2, enabling advanced scientific automation at national laboratory beamlines.