PID Turntable
Completed Fall 2024MEC 411: Control Systems - Analog and digital PID control implementation for precise turntable positioning
Project Overview
Precise control of rotational systems is crucial in many applications, from robotics to industrial automation. This project addressed the challenge of creating a turntable system that could accurately follow a complex, user-defined waveform with minimal tracking error.
The primary objective was to design and implement a control system that could minimize the error between the desired waveform and the actual turntable position, while ensuring stability and responsiveness. The project explored both analog and digital control implementations to understand their relative merits.
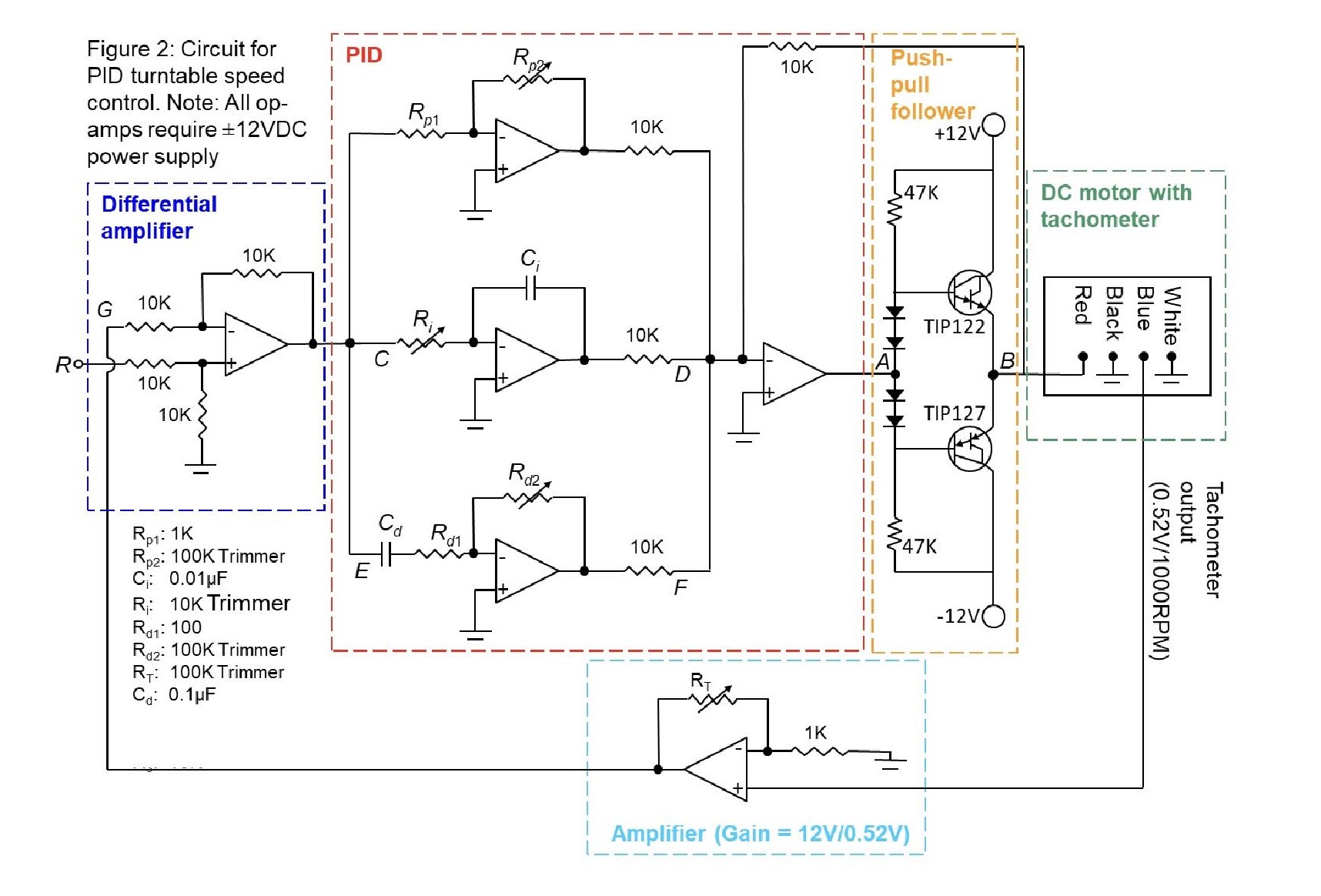
Analog PID Control Circuit
Technical Challenge
Control Objectives
- Precise angular position tracking for complex waveforms
- Minimized steady-state error and transient response time
- System stability across varying operating conditions
- Analog vs. digital control implementation comparison
System Requirements
- Fast response to step inputs with minimal overshoot
- Accurate tracking of sinusoidal and triangular reference signals
- Performance consistency despite system parameter variations
- Smooth operation without excessive control effort
Technology & Components
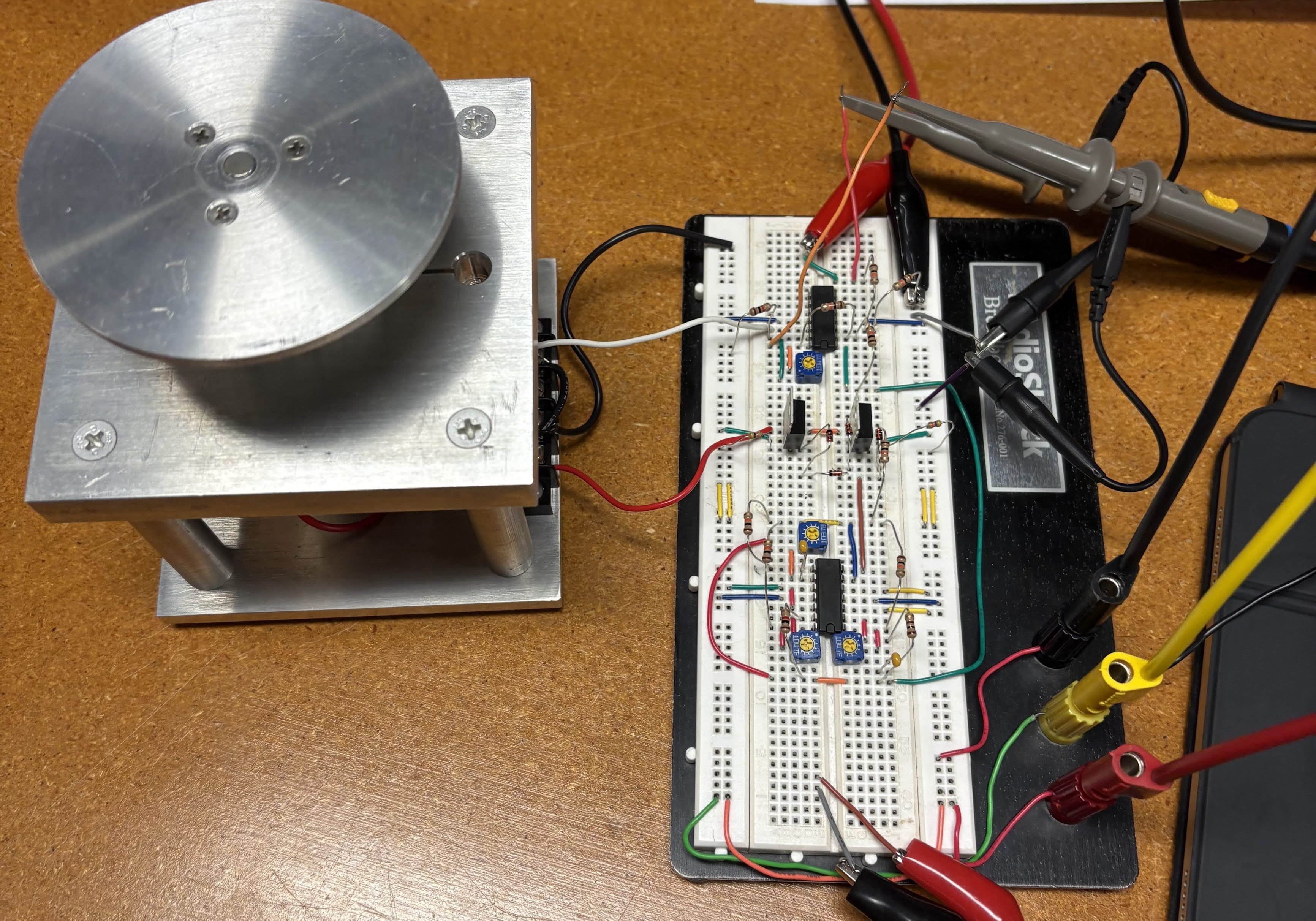
Analog Implementation
- Operational amplifiers for PID computation
- Resistors and capacitors for gain setting
- Potentiometers for tuning parameters
- Turntable with DC motor and encoder
- Wave generator for reference signals
- Oscilloscope for signal monitoring
Digital Implementation
- LabVIEW programming environment
- Data Acquisition (DAQ) system
- Digital signal processing algorithms
- Real-time control loop implementation
- Computer-based parameter adjustment
- Control algorithms capability
Implementation Comparison
Analog PID Controller
Operational amplifier-based implementation providing continuous operation and faster response times without digital sampling delays. Smoother control action avoids quantization errors, ideal for high-speed applications requiring immediate response.
Digital PID Controller
LabVIEW implementation with real-time control and data acquisition through DAQ systems. Digital approach enables control algorithms and parameter adjustment through software.
Performance Trade-offs
Analog implementation offers simplicity and continuous operation with no sampling delays. Digital implementation provides flexibility for complex algorithms and easier parameter tuning. Both approaches achieved comparable position tracking accuracy for the turntable system.
Future Enhancements
Control
- Feed-forward control for disturbance rejection
- Adaptive control algorithms
- Velocity and acceleration feedforward
Hardware Optimization
- Higher resolution encoder for improved accuracy
- Motor with reduced backlash
- Improved analog circuit board design
Microcontroller Implementation
- Embedded system for standalone operation
- Real-time parameter tuning interface
- Data logging and analysis capabilities
Project Impact
Demonstrated both analog and digital PID control implementations for precise turntable positioning, comparing operational amplifier-based continuous control against LabVIEW digital implementation for classical control system applications.