Remote Controlled Ackermann Arduino Car
Completed Fall 2021MEC 101: Freshman Design Innovation - Bluetooth-controlled car with custom Ackermann steering mechanism
Project Overview
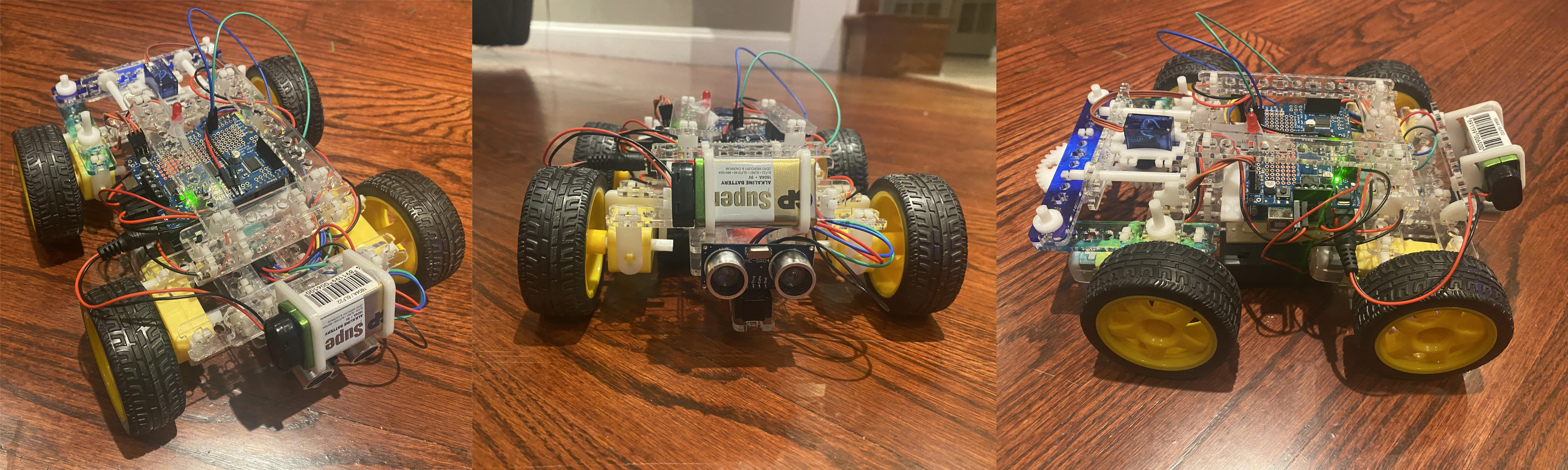
This project involved the design and construction of a Bluetooth-controlled car using an Arduino microcontroller. The primary goal was to create a wirelessly controlled vehicle capable of forward, reverse, left, and right movement.
This project distinguished itself by incorporating a custom-designed four-bar mechanism for steering the front wheels, rather than relying solely on differential speed control. The result was a functional and responsive remote-controlled car with proper Ackermann steering geometry.
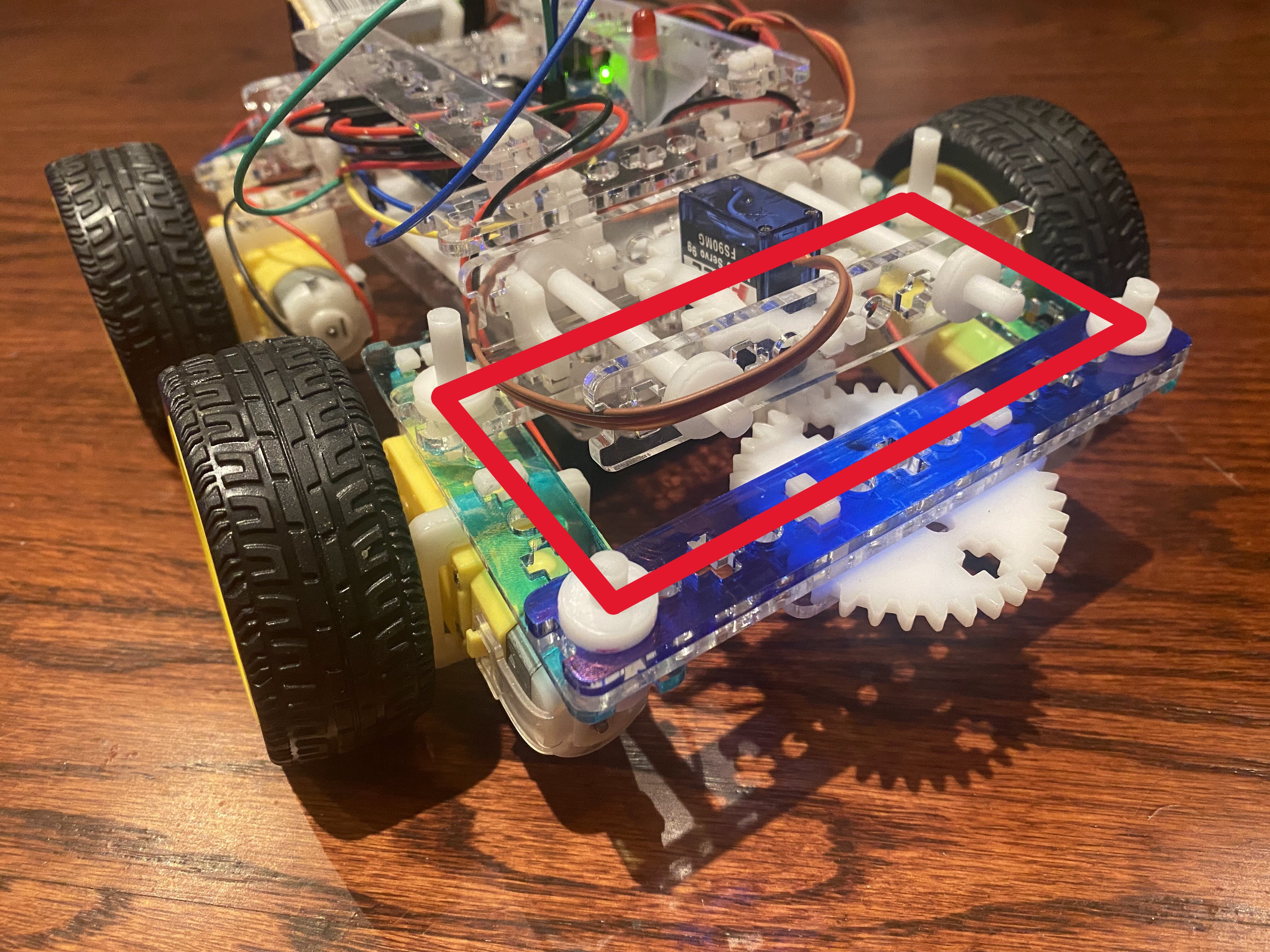
Custom Four-Bar Steering Mechanism
Technical Challenge
This project aimed to explore the potential of Bluetooth technology for a more modern and versatile control interface. Many simpler RC cars use differential speed (varying the speed of the left and right wheels) for steering, which can be imprecise and less stable.
Primary Goals
- Implement Bluetooth wireless control interface
- Design mechanically accurate steering system
- Create custom four-bar linkage mechanism
- Achieve Ackermann steering geometry
Technical Challenges
- Interface Bluetooth module with Arduino
- Process control signals and translate to motor movements
- Control servo motor actuating steering linkage
- Design and fabricate four-bar mechanism
Materials & Technology
Electronic Components
- Arduino Uno microcontroller
- HC-05 Bluetooth Module
- L298N Motor Driver
- 9V Battery power supply
- DC Motors with wheels
- Servo Motor for steering
- Jumper Wires and Breadboard
Software & Tools
- Arduino IDE programming environment
- ArduinoBlue smartphone app
- C++ programming language
- Laser cutting for chassis parts
- CAD design for mechanism
- Bluetooth serial communication
Future Improvements
Features
- Obstacle avoidance using ultrasonic sensors
- Camera integration for FPV control
- GPS navigation capabilities
Hardware Upgrades
- Improved chassis design
- Different motor types for improved performance
- Custom 3D printed rack and pinion system
Control Systems
- Encoder feedback for precise control
- PID control implementation
- Real-time telemetry monitoring
Project Impact
This project demonstrated the integration of Bluetooth communication with both motor and steering control, resulting in a functional remote-controlled car with proper Ackermann steering geometry. It provided hands-on experience with microcontroller programming, wireless communication, and mechanical design principles.